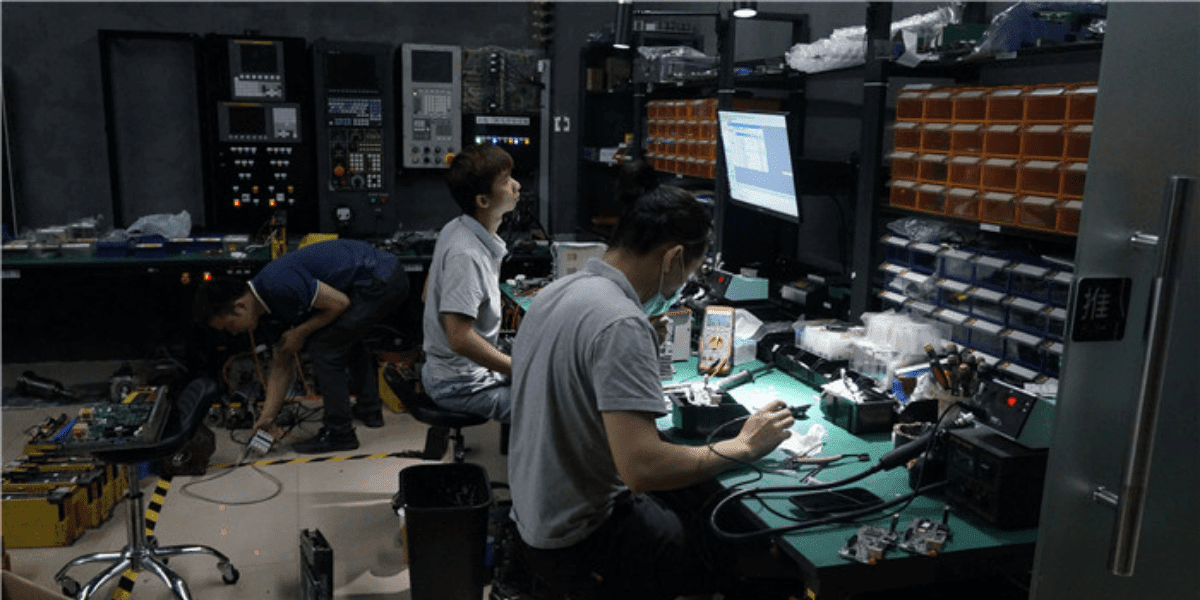
FANUC发那科机器人维修常见的故障,按照故障的功能,分析造成这个故障的原因。示教器报警:SRVO-18制动器异常(G:1A:2),无法停止报警。控制柜内伺服放大器面板LED报警灯亮起。替换焊钳上伺服编码器连接线缆检查硬件没有问题,则替换6轴伺服放大器面板。立点自动化生产线自动植钉输送机不出钉,法拉盘没办法工作,电机出现发烫的情况。那么就是有钉子在箱子内卡主了,使得法拉盘不能正常执行,转动不了所以发烫。螺母检测装置出现报警提醒,选择复位没有办法继续工作的情况,可以尝试将螺母检测的上限数字调高一些,将机器人手动可以运行的话,那么就是凸焊机出现了问题,逐步排查下去。

FANUC发那科机器人维修甚至可解决运输装置,机床和专用工具的复杂任务。兼容系统的硬件和软件部件可与 SINUMERIK 840D powerline 集成。借助于 HMI 和 PLC 开放性,用户可以集成其自己的应用知识。为加工生产实施*的运动控制系统 MCIS 产品。FANUC发那科机器人维修测试方案是由凌肯自动化专家研发出来,这款设备拥有数控机床维修自检功能,不过用户应需要先搞清楚机床的组成,每一块组成部件的功用,熟悉加工原理,数控机床是的结构比较复杂,需要对其有的了解。首先是机床的机械结构,要看得懂工程图,包括要加工的零件以及机床零部件,液压也需要有的了解,懂得液压回路的系统,FANUC发那科机器人维修只需要弄清楚其怎样工作就行了,一般重点在实际的云中当中。

FANUC发那科机器人维修,因为主体以及支架等部件的轮廓比较大,所以先平面定位稳定了,在加工平面,加工孔。先主后次即先加工主要表面,然后加工次要表面。固定循环功能应用实例使用刀具长度补偿功能和固定循环功能加工如图。FANUC发那科机器人维修主要问题是,在正弦值不大,脉冲宽度也小,而脉冲的间隔比较大,这样的电压脉冲可以让负载的电流成分压力减小,这种一般是叫正弦波脉宽调制。SPWM脉冲系列中,不同的脉冲的宽度和之间的间隔宽度,是由正弦波(基准波或调制波)和等腰三角波(载波)的交点来决定的。

另外在处理FANUC发那科机器人维修,不能佩戴手套操作示教盘和操作盘。在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。在按下示教盘上的点动键之前要考虑到机器人的运动趋势。要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉,还需要确认机器人周围区域必没有水或者杂质和油脂等等。